Common CANbus definitions. More...
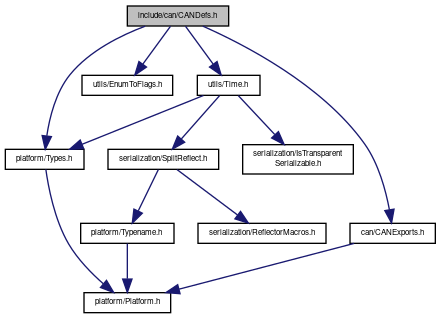
#include <platform/Types.h>#include <utils/EnumToFlags.h>#include <utils/Time.h>#include <can/CANExports.h>
Include dependency graph for CANDefs.h:
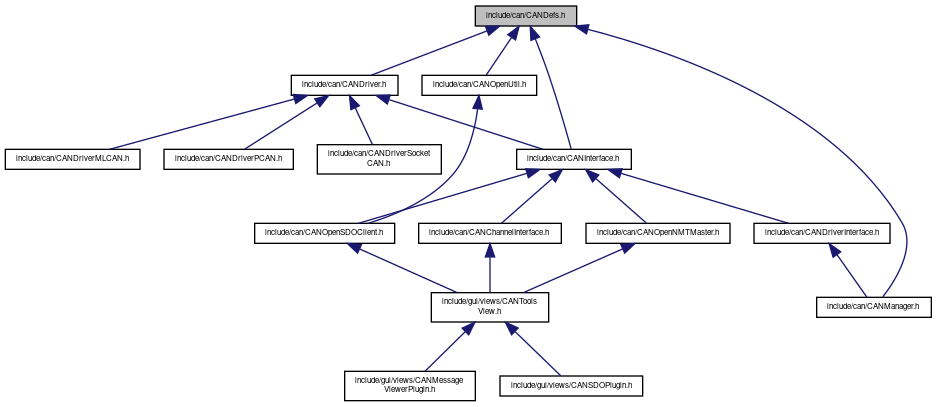
This graph shows which files directly or indirectly include this file:
Go to the source code of this file.
Classes | |
| struct | CANMessage |
| A definition of a CAN message. More... | |
| struct | CANEmergencyMessage |
| A definition of a CAN emergency message. More... | |
Namespaces | |
| mira | |
| mira::can | |
Macros | |
| #define | CAN_MAX_STANDARD_ID 0x7ff |
| #define | CAN_MAX_EXTENDED_ID 0x1fffffff |
| #define | CAN_MSG_TYPE_STANDARD 0x00 |
| #define | CAN_MSG_TYPE_RTR 0x01 |
| #define | CAN_MSG_TYPE_EXTENDED 0x02 |
Enumerations | |
| enum | CANBaudRate { CAN_BAUDRATE_1M = 1000000, CAN_BAUDRATE_500K = 500000, CAN_BAUDRATE_250K = 250000, CAN_BAUDRATE_125K = 125000, CAN_BAUDRATE_100K = 100000, CAN_BAUDRATE_50K = 50000, CAN_BAUDRATE_20K = 20000, CAN_BAUDRATE_10K = 10000, CAN_BAUDRATE_5K = 5000 } |
| An enum of the different CAN baud rates. More... | |
| enum | CANStatusFlags { CAN_STATUS_OK = 0x0000, CAN_STATUS_XMT_FULL = 0x0001, CAN_STATUS_XMT_QUEUE_FULL = 0x0002, CAN_STATUS_RECV_OVERRUN = 0x0004, CAN_STATUS_RECV_QUEUE_OVERRUN = 0x0008, CAN_STATUS_BUS_LIGHT = 0x0010, CAN_STATUS_BUS_HEAVY = 0x0020, CAN_STATUS_BUS_OFF = 0x0040, CAN_STATUS_UNKNOWN_ERROR = 0x8000 } |
| CAN status enum definitions. More... | |
Functions | |
| MIRA_ENUM_TO_FLAGS (CANStatusFlags) | |
| MLAB_CAN_EXPORT std::string | convertCANStatus2String (CANStatusFlags) |
| Convert a CANStatusFlag into a human-readable message. More... | |
Detailed Description
Common CANbus definitions.
- Date
- 2010/09/15
Macro Definition Documentation
◆ CAN_MAX_STANDARD_ID
| #define CAN_MAX_STANDARD_ID 0x7ff |
◆ CAN_MAX_EXTENDED_ID
| #define CAN_MAX_EXTENDED_ID 0x1fffffff |
◆ CAN_MSG_TYPE_STANDARD
| #define CAN_MSG_TYPE_STANDARD 0x00 |
◆ CAN_MSG_TYPE_RTR
| #define CAN_MSG_TYPE_RTR 0x01 |
◆ CAN_MSG_TYPE_EXTENDED
| #define CAN_MSG_TYPE_EXTENDED 0x02 |
